As part of a school group project, I designed and built a custom robotic arm. It used geared DC motors with PID control and magnetic angle sensors for positioning. The arm was integrated with an off-the-shelf AI vision camera, enabling it to detect objects by color and pick them up
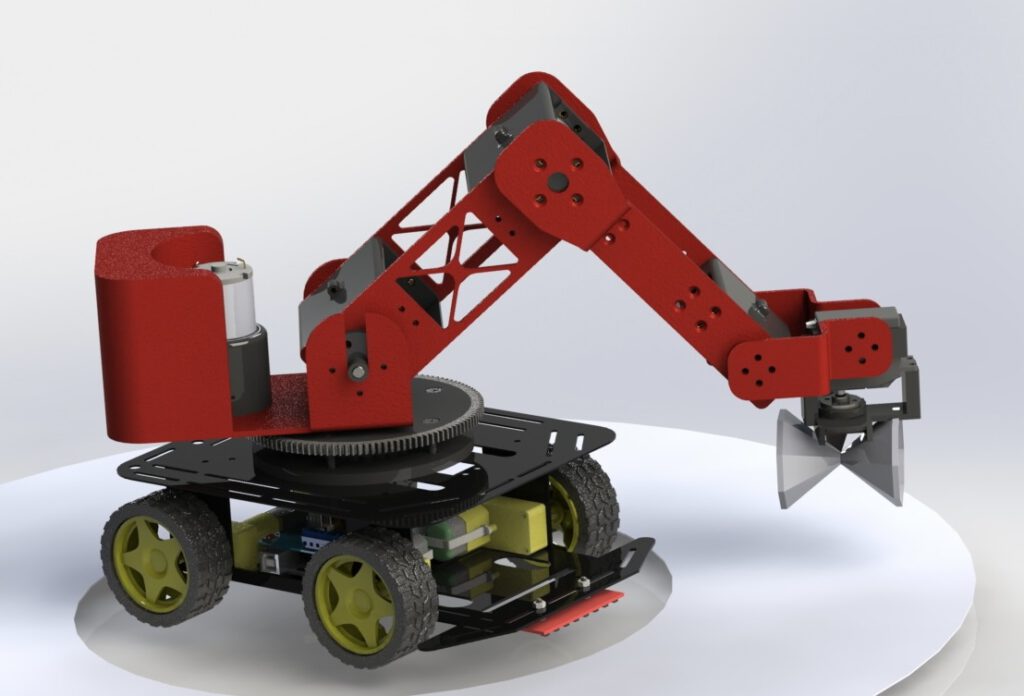
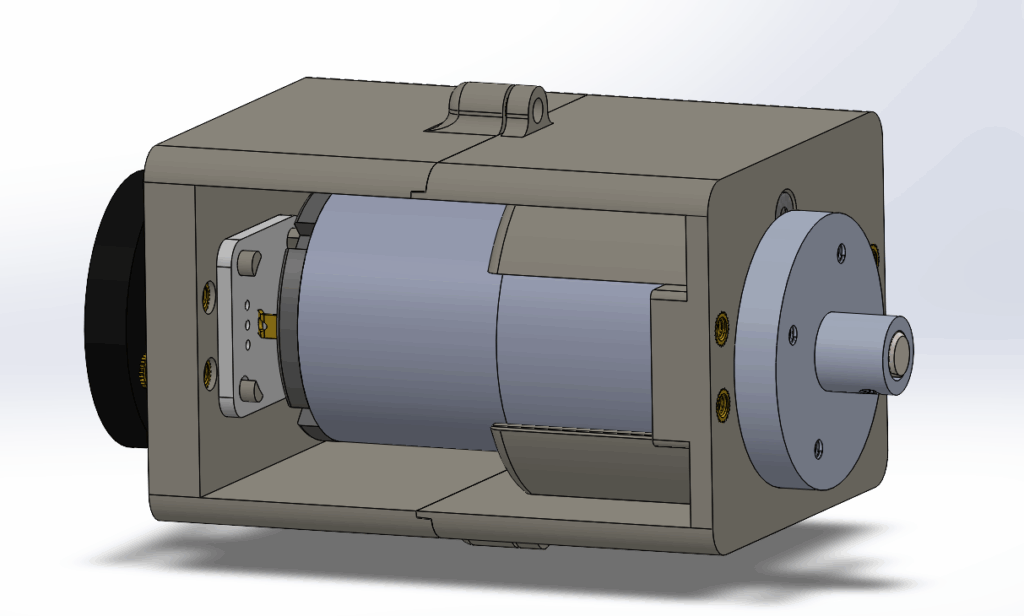
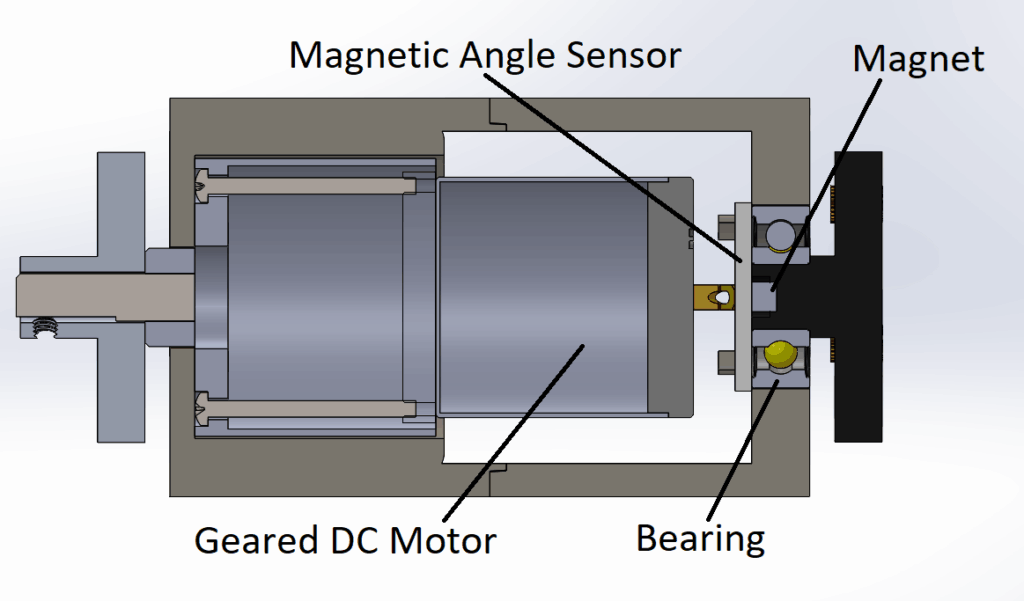
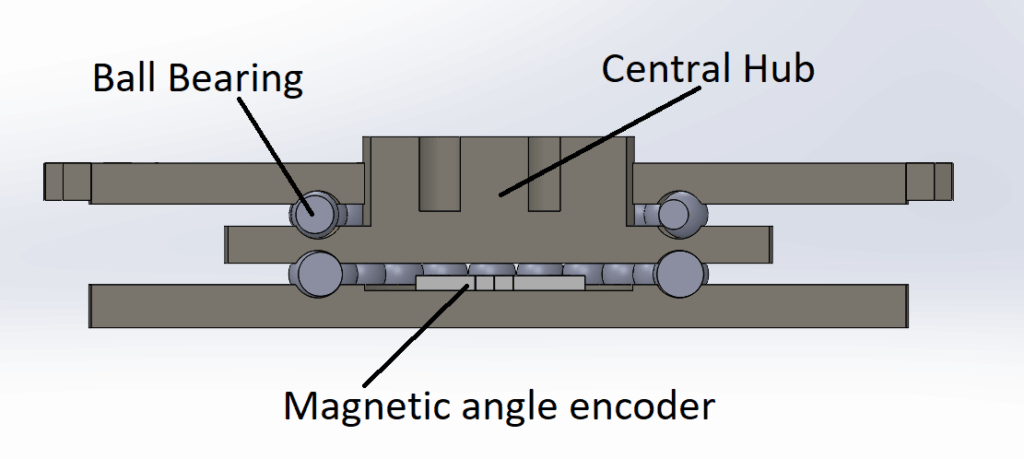
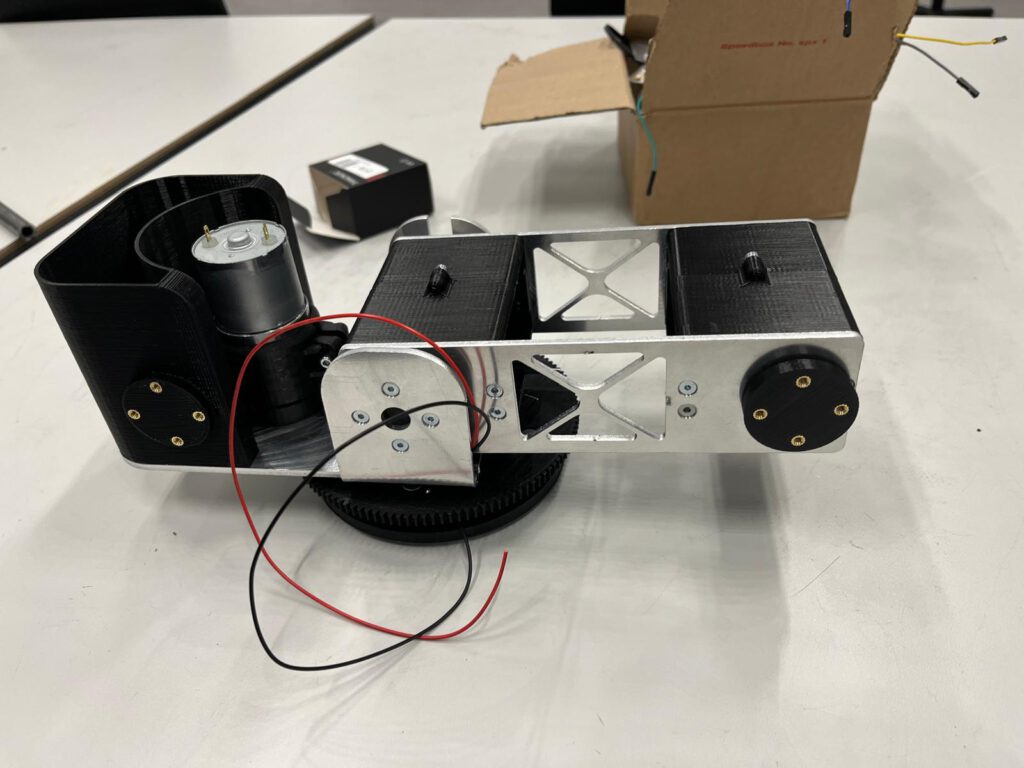
The initial designs used off-the-shelf RC servo motors for the arm joints. These position-controlled servos include internal sensors and control algorithms, so no external control loop is required. They typically offer 180° motion and 15–70 kg·cm of torque, with high-torque models being costly and power-hungry. Considering these factors, the final design used three geared DC motors in PID-loop control with magnetic angle encoders for the base rotation and the two main joints. The last joint carries the lowest load due to leverage, so a standard RC servo was sufficient, and its smaller form factor kept the end effector compact
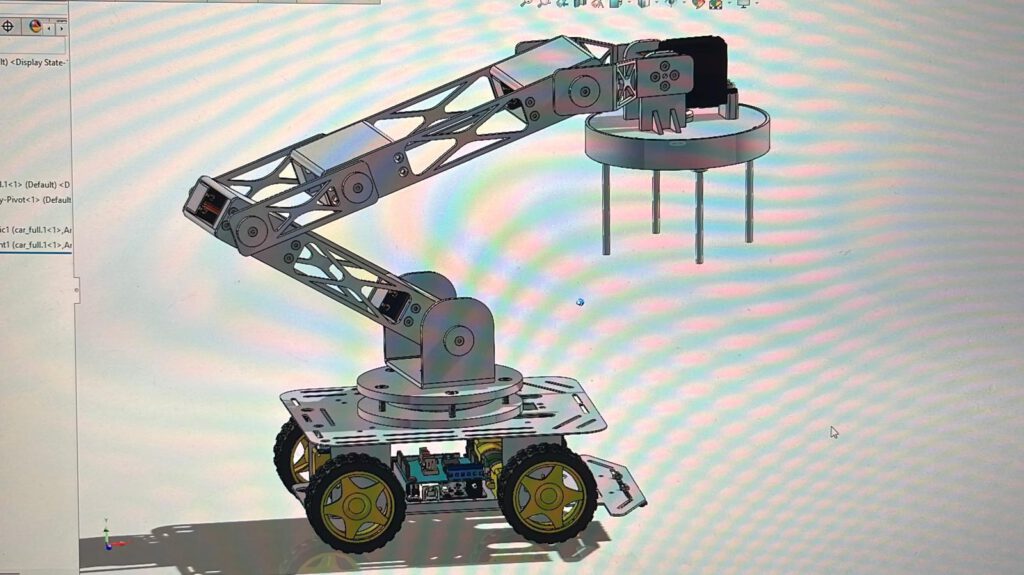
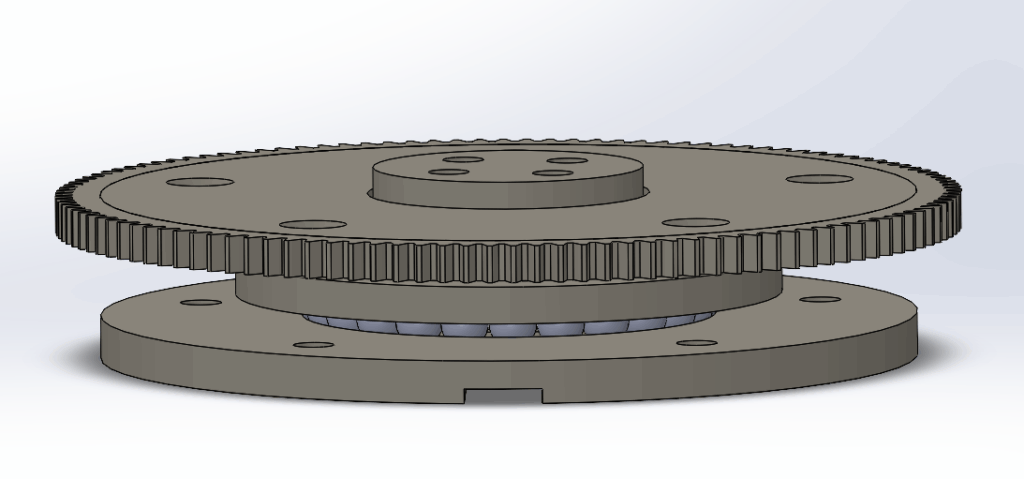
The final design combined laser-cut aluminum sheets with 3D-printed parts. While 3D printing is commonly used in school projects for its simplicity, it often leads to oversized monolithic parts that cannot be manufactured by conventional methods. I aimed to minimize reliance on 3D printing and instead applied conventional techniques such as sheet metal fabrication and lathe turning.